书写工具:ipad Pencil + GoodNotes
PDF版点此下载:相机标定.pdf
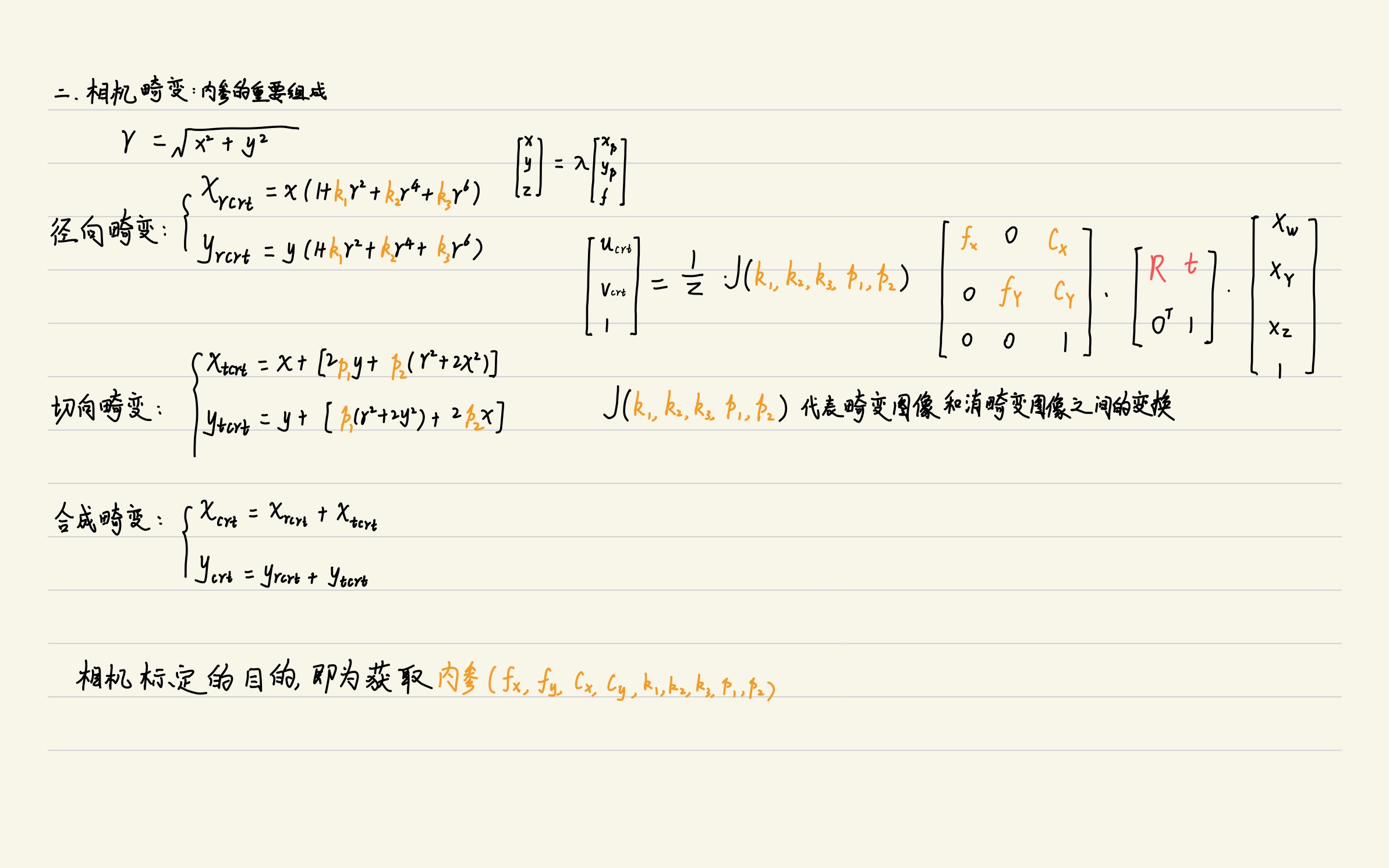
至此,我们现在的任务就是找出一大堆具有对应关系的像点 和物点 的点对作为样本,来训练出模型的9个参数
解决上述问题的办法是采用标定板,利用透视不变性原理。广泛采用的是棋盘格和圆点格。
圆点格的效果好于棋盘格,因为圆点质心的透视不变性要比棋盘格的角点稳定的多。
圆点格的检测似乎是Halcon的专利(存疑),因此OpenCV和Matlab标定工具箱用的是棋盘格,要用圆点格得要自己写算法。
书写工具:ipad Pencil + GoodNotes
PDF版点此下载:相机标定.pdf
至此,我们现在的任务就是找出一大堆具有对应关系的像点 和物点 的点对作为样本,来训练出模型的9个参数
解决上述问题的办法是采用标定板,利用透视不变性原理。广泛采用的是棋盘格和圆点格。
圆点格的效果好于棋盘格,因为圆点质心的透视不变性要比棋盘格的角点稳定的多。
圆点格的检测似乎是Halcon的专利(存疑),因此OpenCV和Matlab标定工具箱用的是棋盘格,要用圆点格得要自己写算法。

