写在前面
尺度不变特征变换(Scale-invariant feature transform, SIFT)
论文:Distinctive Image Features from Scale-Invariant Keypoints
你们能理解那种感受吗?就是,我明明正在实验室听b站的up主讲SIFT,却还要担心老板会进来…

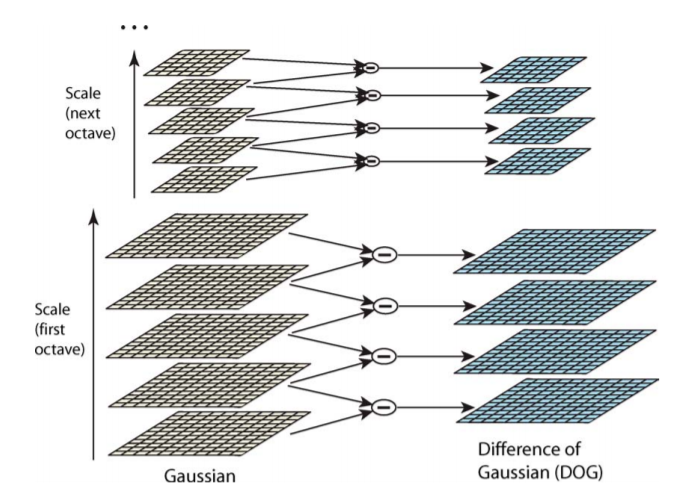
高斯差分金字塔
octave:组
高斯金字塔(尺度空间):
-
用不同大小(尺度)的的高斯核对原图片卷积得octave1,对octave1进行降采样得到octave2
-
用不同大小(尺度)的的高斯核卷积对octave2卷积,接着降采样得到octave3
-
用不同大小(尺度)的的高斯核卷积对octave3卷积,接着降采样得到octave4
-
…
为什么要建这个金字塔呢?模拟摄像机拍摄的照片“近大远小”,远处的物体小,进出的物体大。高斯核去卷积模拟的是“近处清晰远处模糊”
高斯差分金字塔:
同一octave里,相邻的两层相减(就是普通的减法),得到DOG
论文里建议,
octave组数的取值:
,M,N是原图的宽和高
层数的取值:
,n是希望提取的层数
尺度如何选择?
关键点位置的确定
1.阈值化
ps:因为上一步是作的减法,所以可能会出现像素值为负数的情况。所以这里用了绝对值,T是自己设置的,在原始论文和opencv中都用的0.04。
如果这个绝对值太小,小于这个阈值的话,则认为该像素点是噪声,丢弃。
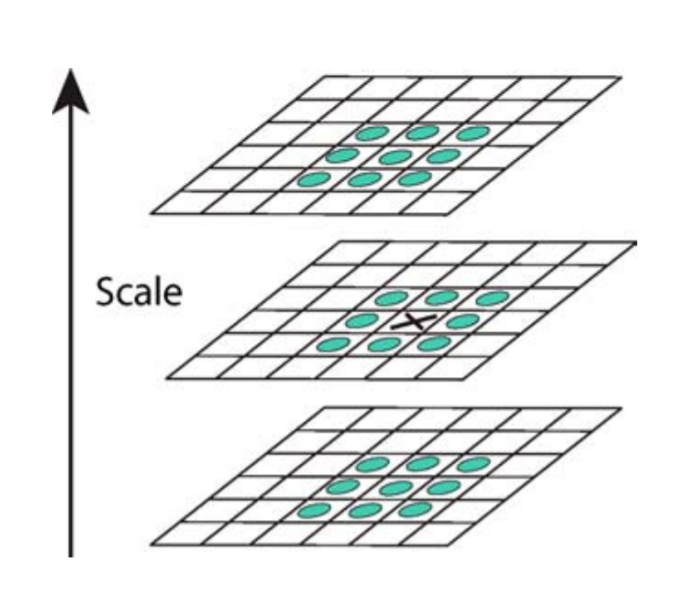
2.在高斯差分金字塔中找极值
3.对极值点进行精确定位
上一步找到的极值点是离散空间中的极值点,因为尺度空间是离散的(上一层是下一层的k倍,中间的都没被取到,canny里用线性插值的方式去取,这里用泰勒展开)
在检测到极值点出做三元二阶泰勒展开
细节问题:迭代次数限制、解超出一定范围舍去
4. 舍去低对比度的点
若,则舍去点X
5. 边缘效应的去除
我这个小白:边缘效应是啥玩意儿???

